核心技术
多模态智驾大模型
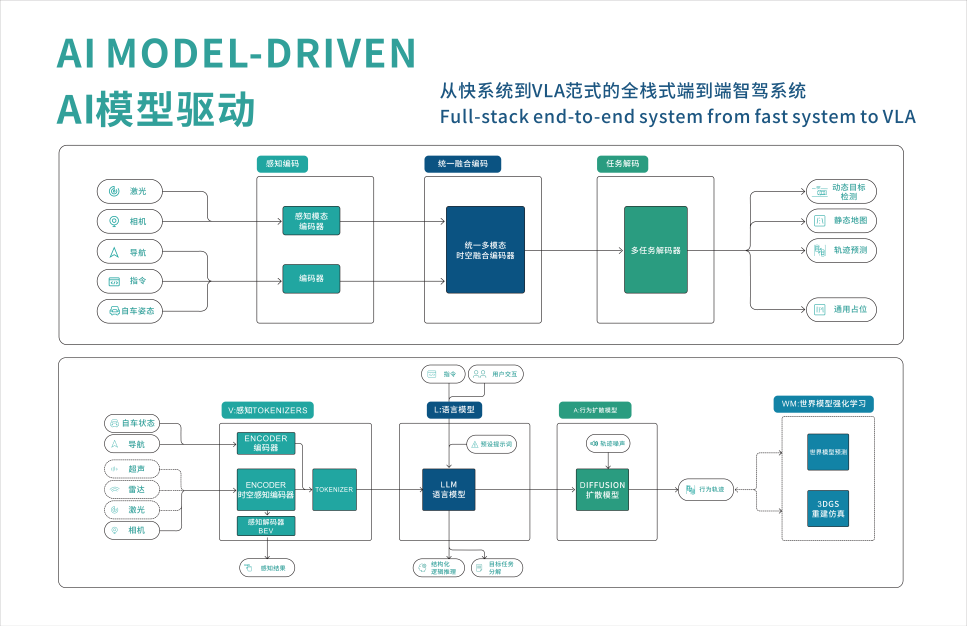
通过百亿参数级基础模型与强化学习驱动的世界模型,打造多模态智能驾驶大模型(Motovis大模型)。该技术兼具泛化能力与场景适应能力,支持跨模态数据交互与智能决策,可灵活部署于嵌入式平台,构建高度拟人化的驾驶智能体,提升智能驾驶系统的安全性与智能化水平。
MOTOVIS VLA基础大模型框架,是认知模型的基础,是以视觉编码器,视觉语言模型,动作策略模型为基础,以世界模型为强化学习环境,以4D数据集,VQA数据集,法规数据集,物理交互数据集作Fine Tune。